晶盾汽车防盗报警系统工作原理之二
图3 是远程汽车防盗报警系统数据整形电路, 采用六反相器集成电路CD4069, 整形后的数据由(8) 脚输出。
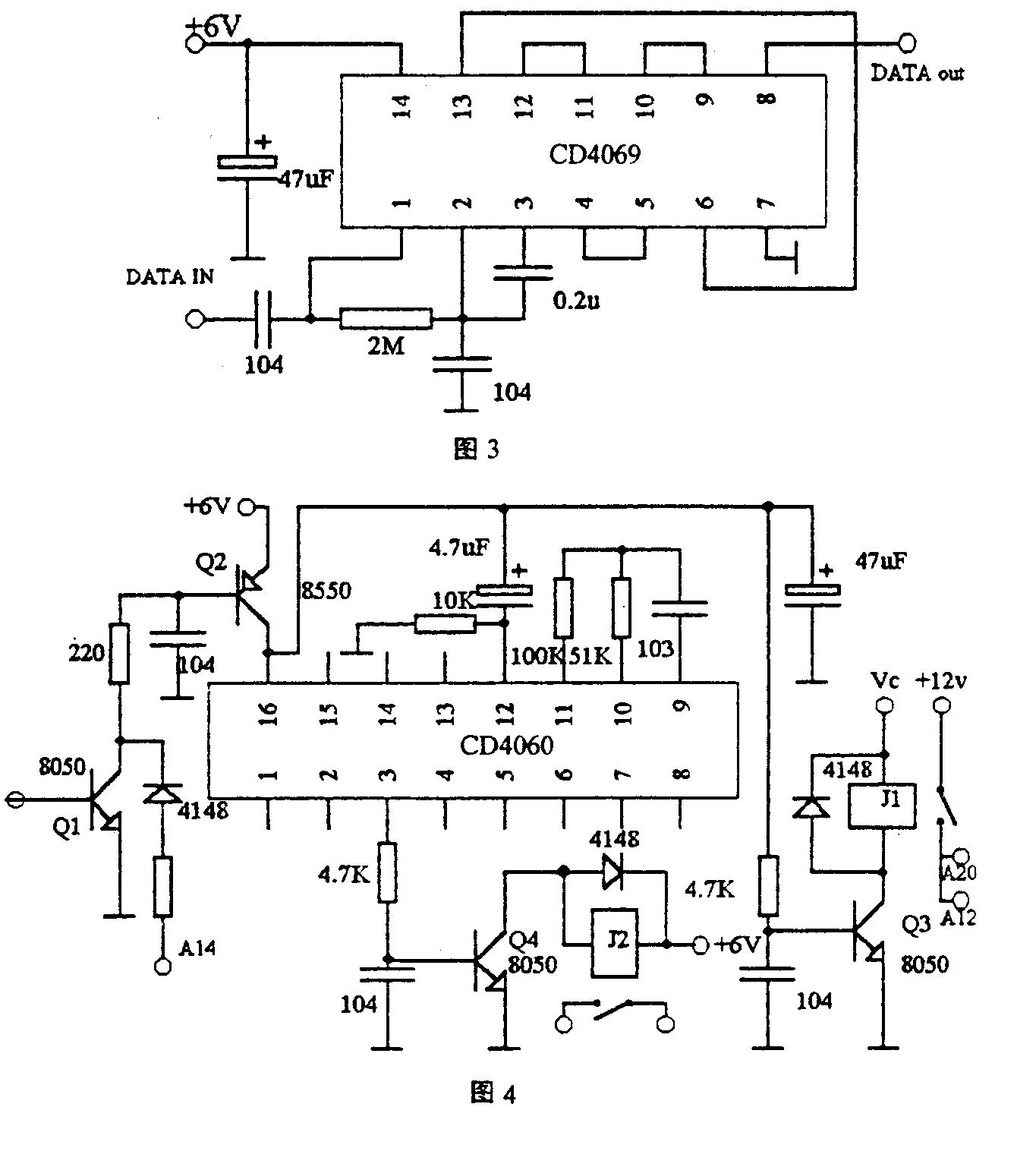
图4 是远程汽车防盗报警系统解码电路, 采用PH IL IPS 公司生产的POCSA G 码解码专用芯片CPF5001. (1) 脚是复位端, (9)、(10) 脚接时钟晶体, (7)、(8) 脚是数据输入、输出端(可将地址码和其他信息写入片内EEPROM ) 中, (5) 脚是整形后的脉冲数据输入端, (16) 脚是输出端, 如解码成功该脚输出高电平。
图5 是远程汽车防盗报警系统计时器电路, 由14 分频器CD4060 构成, 调节其(9)、(10) 脚的C、R 值可改变其内部的时钟频率, 从而调节定时时间长短, (12) 脚为复位端, (16) 脚是正电源, 当CPF5001 的(16) 脚输出高电平时Q 1、Q 2 导通, CD4060 得电工作, 同时Q 3 导通J 1 吸合, 进行声、光报警. 当计时器到时后(3) 脚输出高电平Q 4 导通, 汽车电源继电器动作, 整车断电.图6, 图7 是远程汽车防盗报警系统无线遥控电路, 可用于无线遥控锁车、解锁和寻车等. 两电路均采用射频收发模块。图6 是远程汽车防盗报警系统发射电路, 其中PT - 2262 是编码芯片, (1) —(8) 脚是地址端, (10) —(13) 脚是数据端,( 14) 脚是控制端, (15)、(18) 脚外接时钟电阻, (17) 脚为信号输出端. F05A 是发射模块, 它采用声表谐振稳频, 频率一致性较好且工作稳定. 图7 是远程汽车防盗报警系统接收电路J 04E 是接收模块, 它采用超外差、二次变频结构, 所有的射频接收、混频、滤波、数据解调、放大整形全部在其内部完成. PT - 2272 是与PT - 2262 配合使用的解码芯片, 其(1) - (8) 脚为地址端, (17) 脚为解码有效指示端、(15)、(16) 脚为外接时钟电阻端, (10) - (13) 脚为数据输出端, 如解码有效其相应端输出高电平。
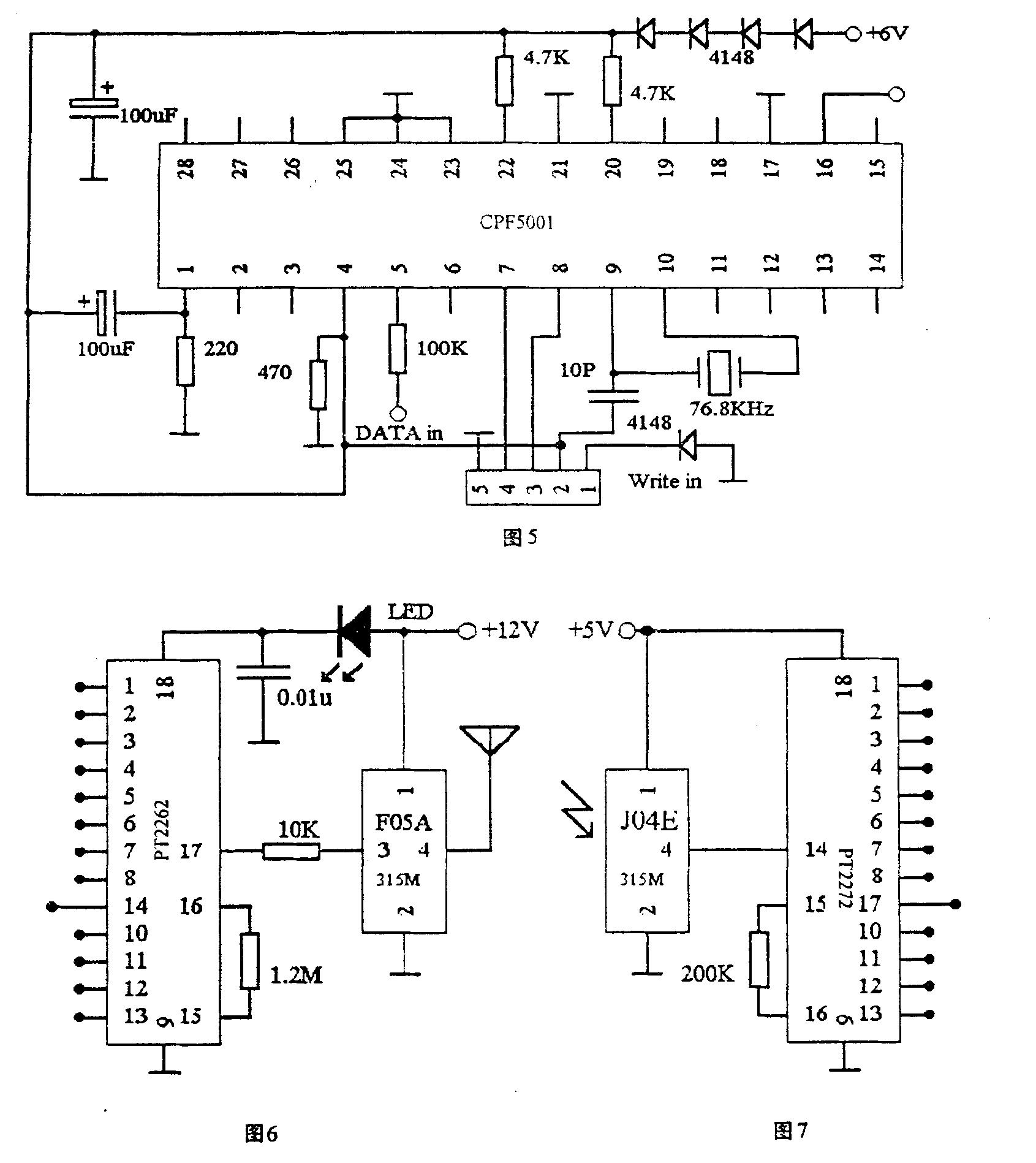
图8 是远程汽车防盗报警系统P IC16C57- RCöP 构成的中央处理器, 其(6) 脚为震动传感器信号输入端, (7) 脚为门边触发信号输入端, (22) —(25) 脚为遥控数据输入端, (28) 脚为复位端. 中央处理器将遥控信号和震动传感器以及门边开关的信号进行状态识别后, 由(13) - (18)、(20) 脚输出相应的控制信号, 经TDG2003A P 驱动后(驱动电路如图9) 控制各种功能继电器完成中控锁的控制和声、光报警系统及汽车电源的控制。


